Please prepare the following
- Grove - Vision AI Module or SenseCAP A1101
- USB Type-C cable
- Linux PC
We first need to configure the host PC. Here we have used a PC with Ubuntu 22.04 installed.
- Step 1. Clone the following repo and access it
git clone https://github.com/Seeed-Studio/Edgelab
cd Edgelab
- Step 2. Configure the host environment by running the following script which will download and install the relevant dependencies
python3 tools/env_config.pyThe above script will mainly install PyTorch, MMCV, MMClassification, MMDetection and MMPose.
Note: The above script will add various environment variables to the file ~/.bashrc, establish a conda virtual environment called edgelab, install relevant dependencies inside the virual environment.
- Step 3. Eventhough everything is initialized at this point, they are not activated. Activate conda, virtual environments, and other related environment variables
source ~/.bashrc
conda activate edgelabNow we have finished configuring the host environment
We need to generate a firmware image for the Grove - Vision AI to support the analog meter reading detection model because the default firmware which is pre-installed out-of-the-box does not support it.
If you want to download an already pre-compiled firmware, please follow the links below. But we recommend you to compile the firmware from source, so that you will have the latest firmware always.
- Step 1: Download GNU Development Toolkit
cd ~
wget https://github.com/foss-for-synopsys-dwc-arc-processors/toolchain/releases/download/arc-2020.09-release/arc_gnu_2020.09_prebuilt_elf32_le_linux_install.tar.gz- Step 2: Extract the file
tar -xvf arc_gnu_2020.09_prebuilt_elf32_le_linux_install.tar.gz- Step 3: Add arc_gnu_2020.09_prebuilt_elf32_le_linux_install/bin to PATH
export PATH="$HOME/arc_gnu_2020.09_prebuilt_elf32_le_linux_install/bin:$PATH"- Step 4: Navigate to the following repo of Edgelab
cd Edgelab/examples/vision_ai- Step 5: Download related third party, tflite model and library data (only need to download once)
make download- Step 6: Compile the firmware according to your hardware
For Grove - Vision AI Module
make HW=grove_vision_ai APP=meter
make flashFor SenseCAP A1101
make HW=sensecap_vision_ai APP=meter
make flashThis will generate output.img inside ~/Edgelab/examples/vision_ai/tools/image_gen_cstm/output/ directory
- Step 7: Generate firmware image firmware.uf2 file so that we can later flash it directly to the Grove - Vision AI Module/ SenseCAP A1101
python3 tools/ufconv/uf2conv.py -t 0 -c tools/image_gen_cstm/output/output.img -o firmware.uf2This will generate firmware.uf2 inside ~/Edgelab/examples/vision_ai directory
Firmware generation for object detection model will be coming soon!
We have already prepared a ready-to-use dataset for your convenience
-
Step 1. Click here to download the dataset
-
Step 3. Create a new folder named datasets inside the home directory
cd ~
mkdir datasets- Step 3. Unzip the previously downloaded dataset and move the meter folder into the newly created datasets folder
Here we explain how to use your own dataset
If you want to train your own analog meter detection model for a specific application, you need to spend sometime to collect images to prepare a dataset. Here you can take several photos (start with 200 and go higher to improve accuracy) of the analog meter that you want to detect with the meter pointer at different points and also take photos at different lighting conditions and different environments as follows


Next we need to annotate all the images that we have collected. Here we will use an application called labelme which is an open source image annotation tool.
-
Step 1. Visit this page and install labelme according to your operating system
-
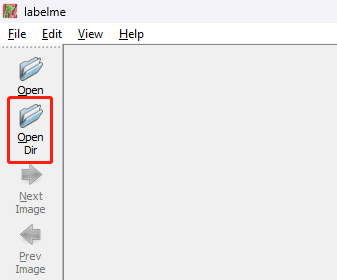
Step 2. On the command-line, type the following to open labelme
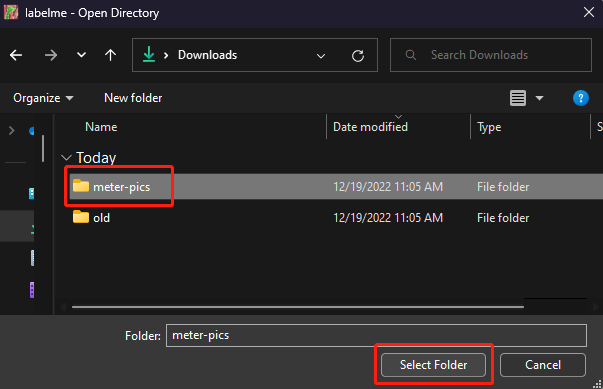
labelme- Step 3. Once labelme opens, click on OpenDir, select the folder that you have put all the collected images and click Select Folder
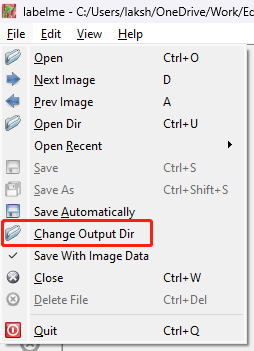
- Step 4. Later, when we annotate images, labelme will generate a json file for each image and this file will contain the annotation information for the corresponsing image. Here we need to specify a directory to store these image annotations because we recommend to store these json files and image files in 2 different folders. Go to
File > Change Output Dir
- Step 5. Create a new folder, select the folder and click Select Folder
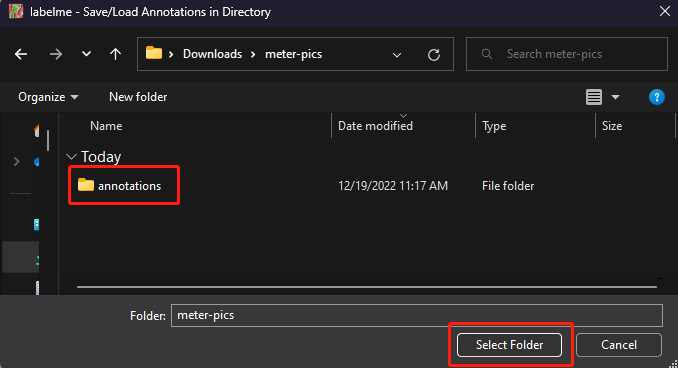
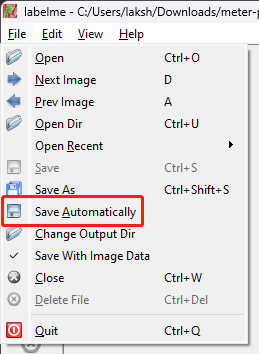
- Step 6. Go to
File > Save Automaticallyto save time when annotating all the images. Otherwise it will pop up a prompt to save each image.
- Step 7. Right click on the first opened image and select Create Point

- Step 8. Draw a point at the tip of the pointer, set any label name and click OK
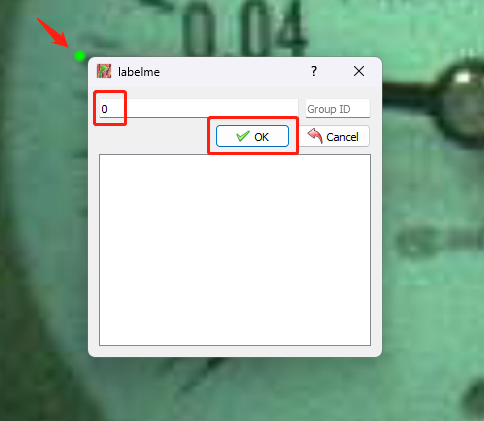

After the point, there will be a new json file created automatically for each image file under "annotations" folder as mentioned before.
Now you need to manually organize the dataset by splitting all the images and annotations into train, val, test directories as follows
Here we recommend you to split in the following percentages
- train = 80%
- val = 10%
- test = 10%
So for example, if you have 200 images, the split would be
- train = 160 images
- val = 20 images
- test = 20 images
meter_data
|train
|images
|a.jpg
|b.jpg
|annotations
|a.json
|b.json
|val
|images
|c.jpg
|d.jpg
|annotations
|c.json
|d.json
|test
|images
|e.jpg
|f.jpg
|annotations
|e.json
|f.json
You can use public datasets to easily start training
We have already configured yolov3_mbv2_416_coco.py file out-of-the-box to download and include the PASCAL VOC dataset which is a public dataset.
You can also use other public datasets available online. Simply search open-source datasets on Google and choose from a variety of datasets available. Make sure to download the dataset in COCO or Pascal VOC format because only those 2 formats are supported by training at the moment.
Here we will demonstrate how to use Roboflow Universe to download a public dataset ready for training. Roboflow Universe is a recommended platform which provides a wide-range of datasets and it has 90,000+ datasets with 66+ million images available for building computer vision models.
-
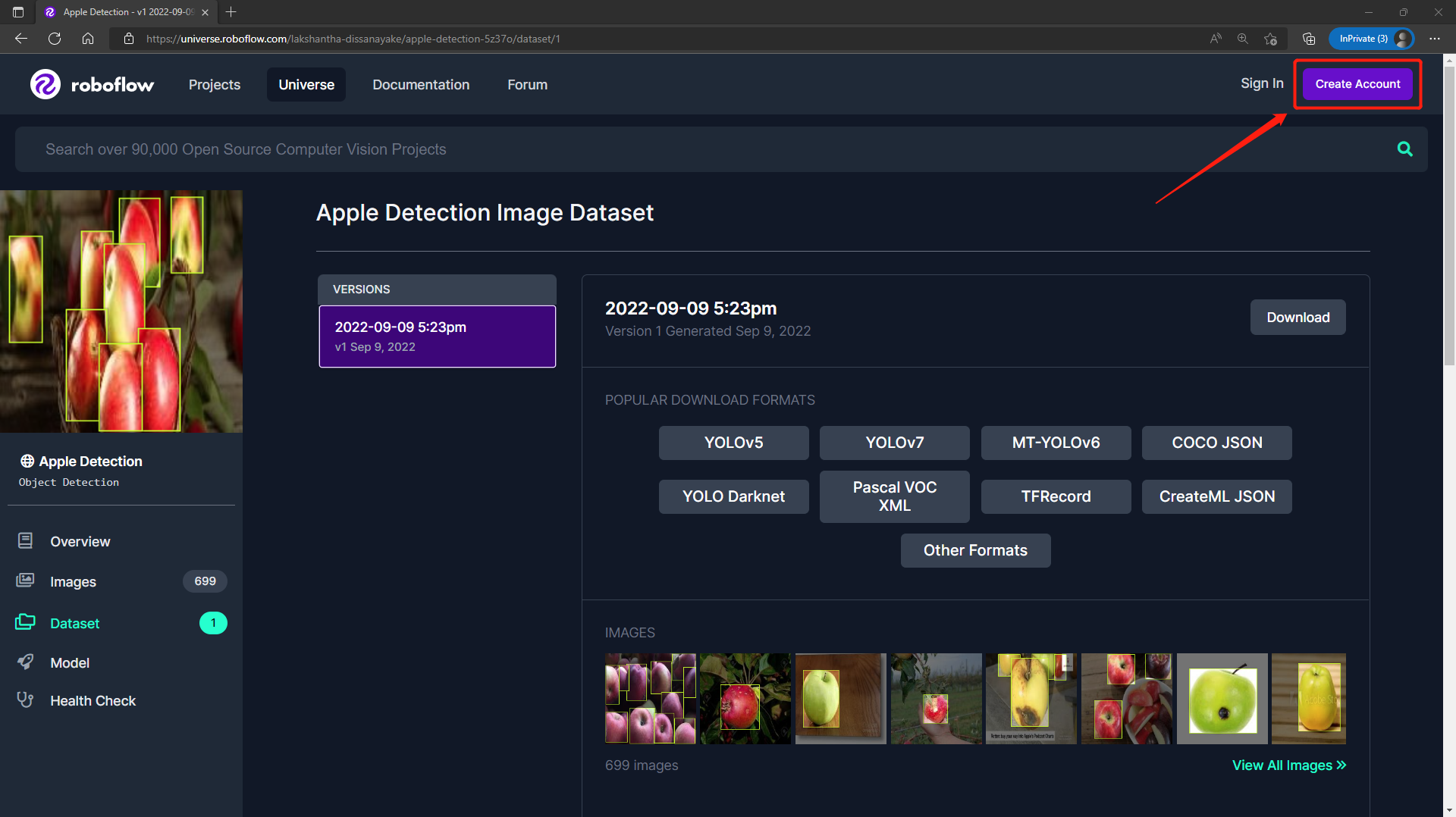
Step 1. Visit this URL to access an Apple Detection dataset available publicly on Roboflow Universe. This is a dataset with a single class named as apple
-
Step 2. Click Create Account to create a Roboflow account
- Step 3. Click Download, select COCO as the Format, click download zip to computer and click Continue
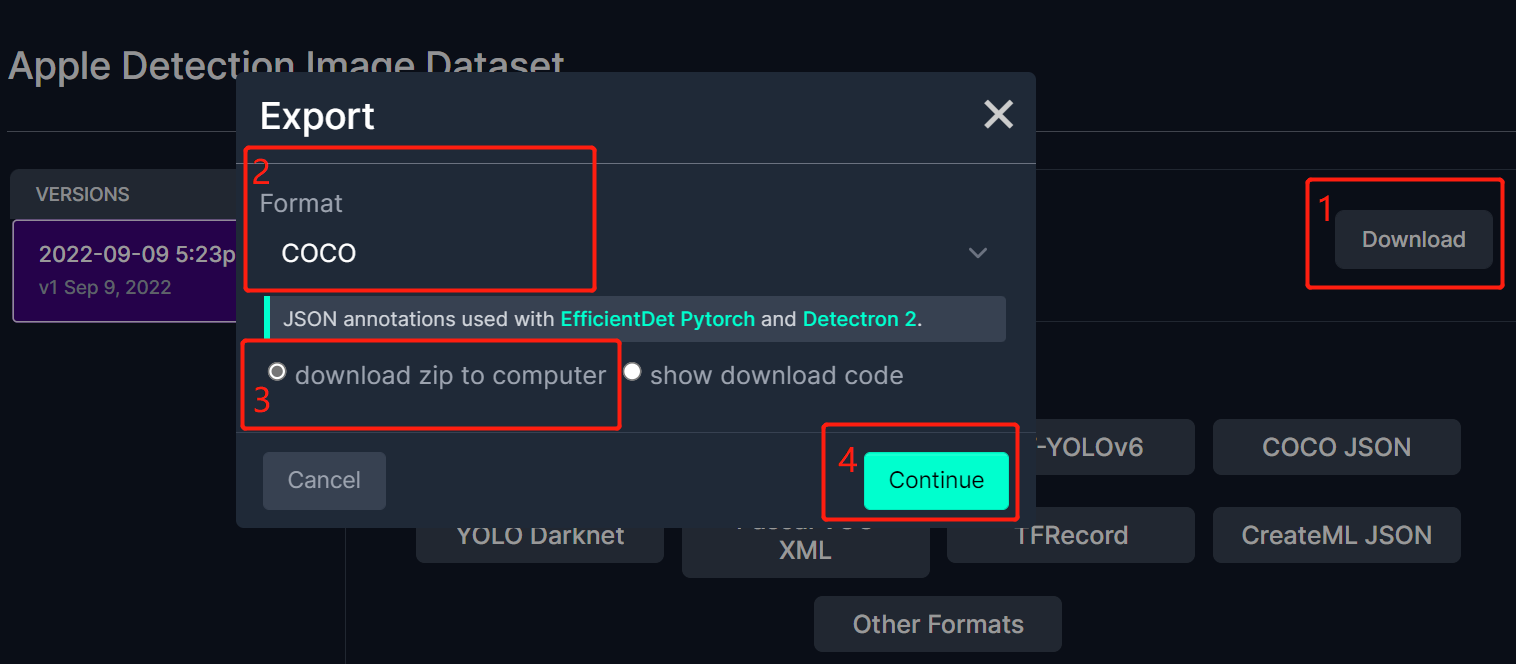
Note: You can also choose Pascal VOC as the Format
This will place a .zip file in the Downloads folder on your PC
- Step 4. Go to Downloads folder and unzip the downloaded file
cd ~/Downloads
unzip **file_name.zip**
## for example
unzip Apple\ Detection.v1i.coco.zipYou can use your own dataset to easily start training
If you use your own dataset, you will need to annotate all the images in your dataset. Annotating means simply drawing rectangular boxes around each object that we want to detect and assign them labels. We will explain how to do this using Roboflow.
Here we will use a dataset with images containing apples
-
Step 1. Click here to sign up for a Roboflow account
-
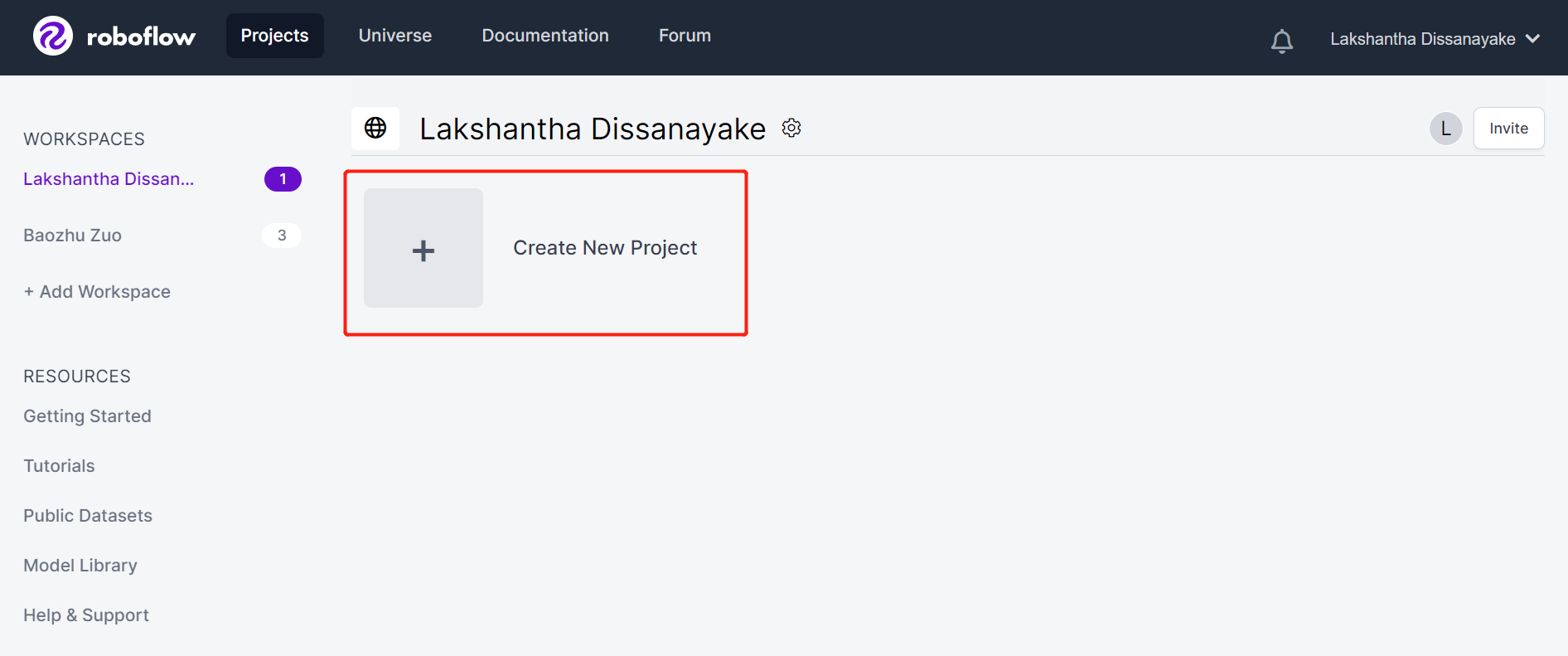
Step 2. Click Create New Project to start our project
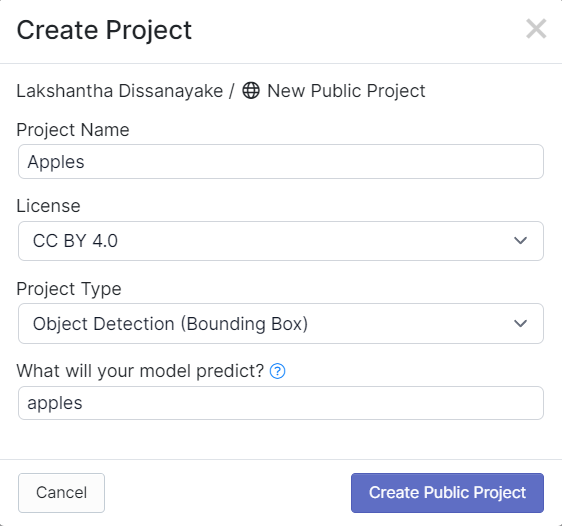
- Step 3. Fill in Project Name, keep the License (CC BY 4.0) and Project type (Object Detection (Bounding Box)) as default. Under What will your model predict? column, fill in an annotation group name. For example, in our case we choose apples. This name should highlight all of the classes of your dataset. Finally, click Create Public Project.
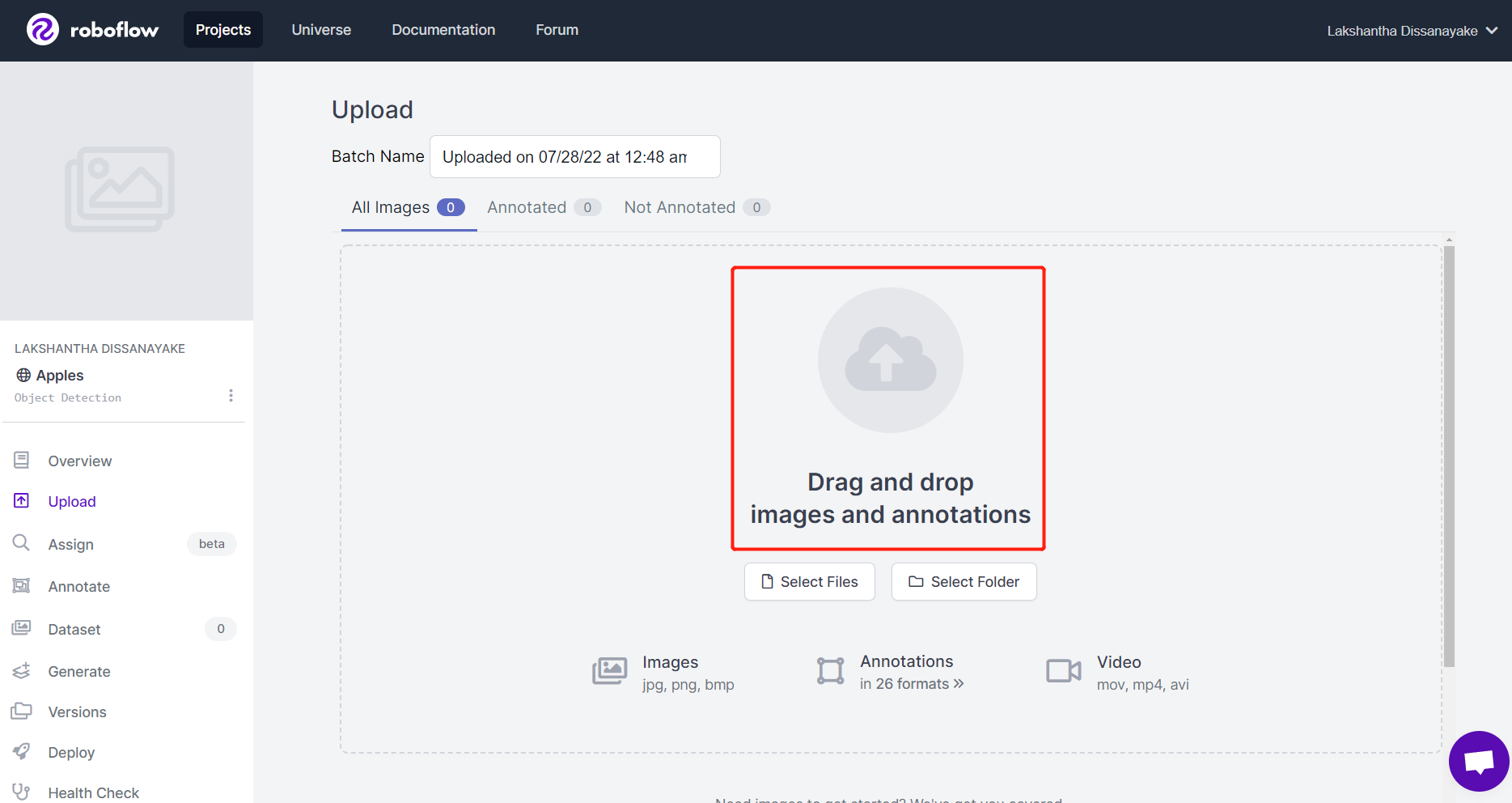
- Step 4. Drag and drop the images that you have captured
- Step 5. After the images are processed, click Finish Uploading. Wait patiently until the images are uploaded.
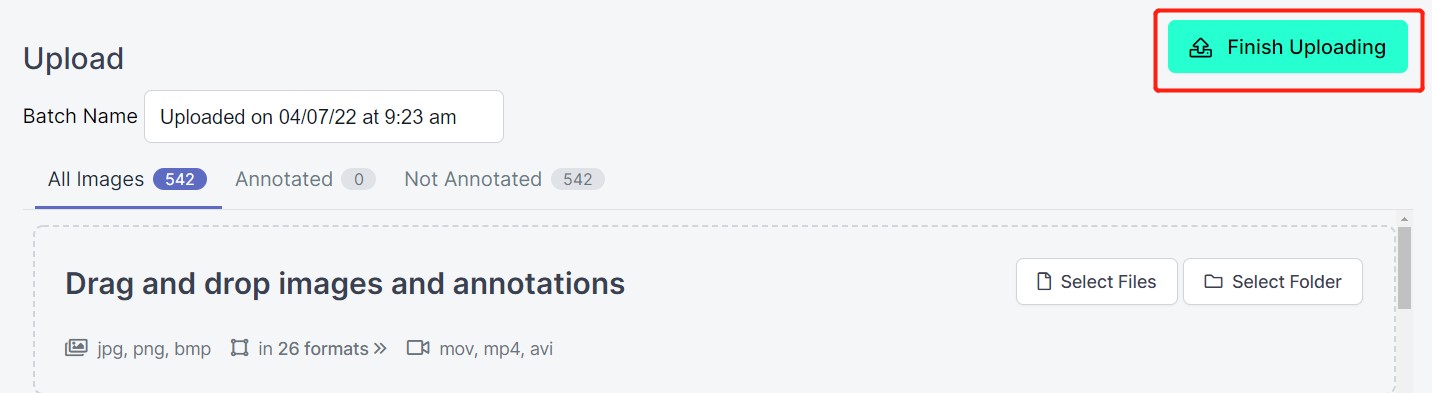
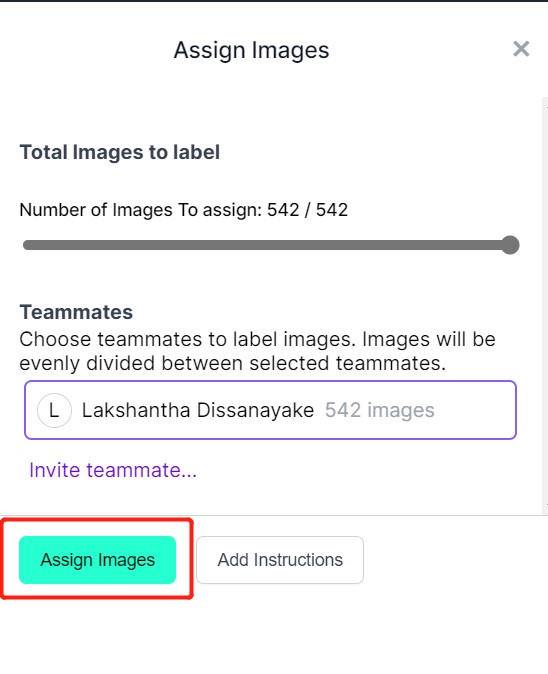
- Step 6. After the images are uploaded, click Assign Images
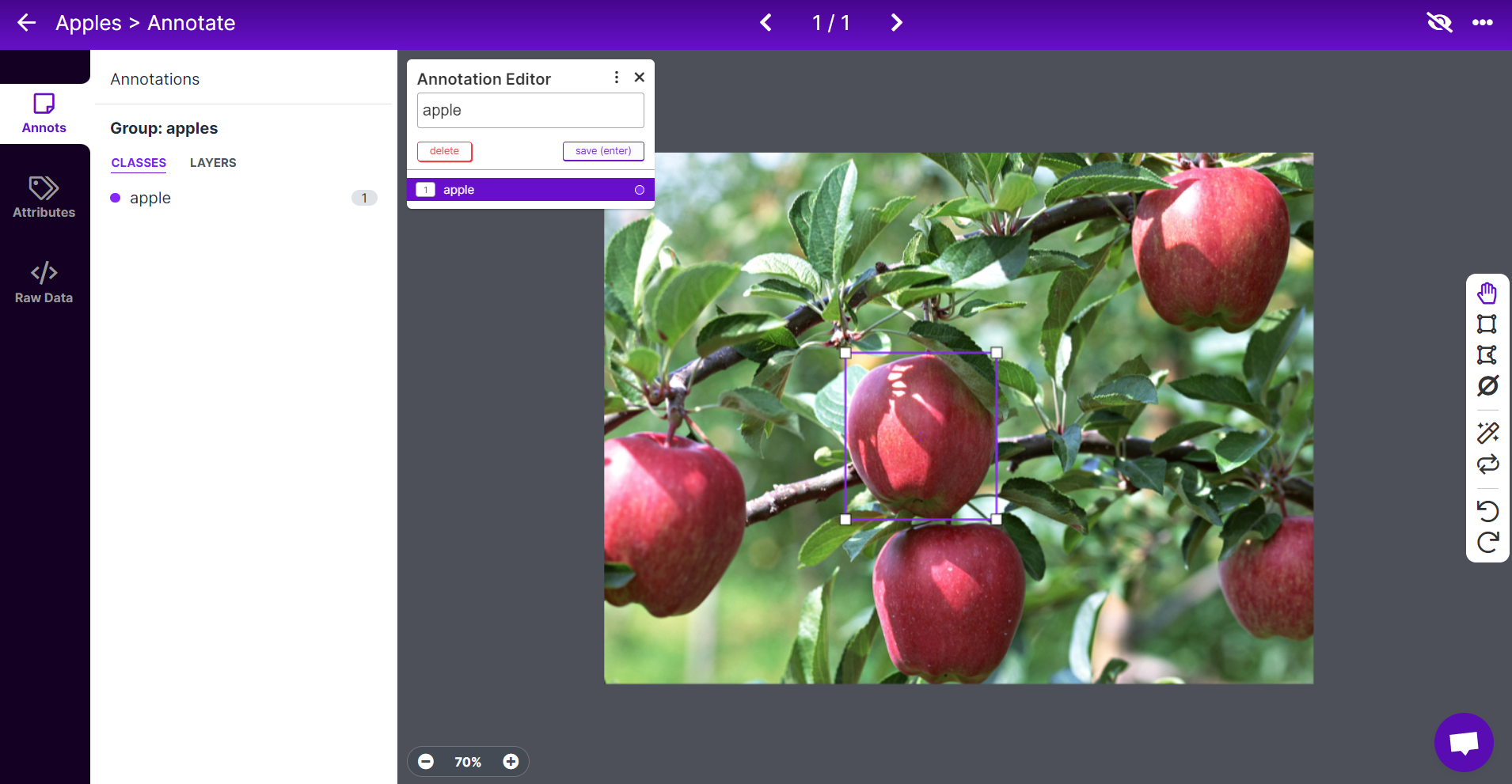
- Step 7. Select an image, draw a rectangular box around an apple, choose the label as apple and press ENTER
- Step 8. Repeat the same for the remaining apples
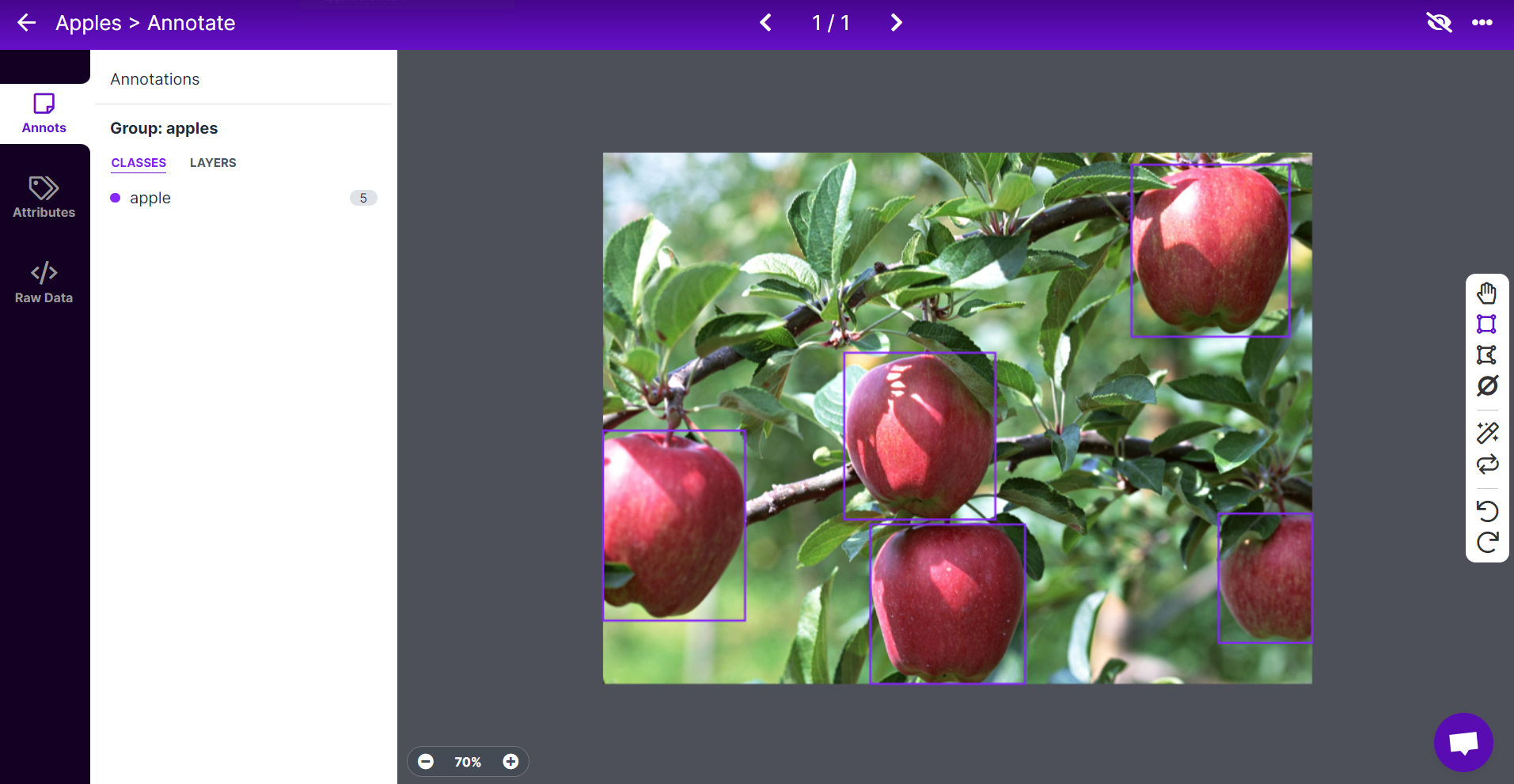
Note: Try to label all the apples that you see inside the image. If only a part of an apple is visible, try to label that too.
- Step 9. Continue to annotate all the images in the dataset
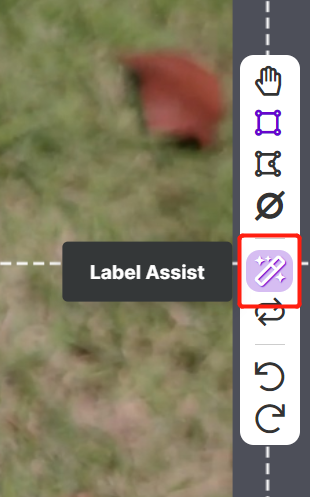
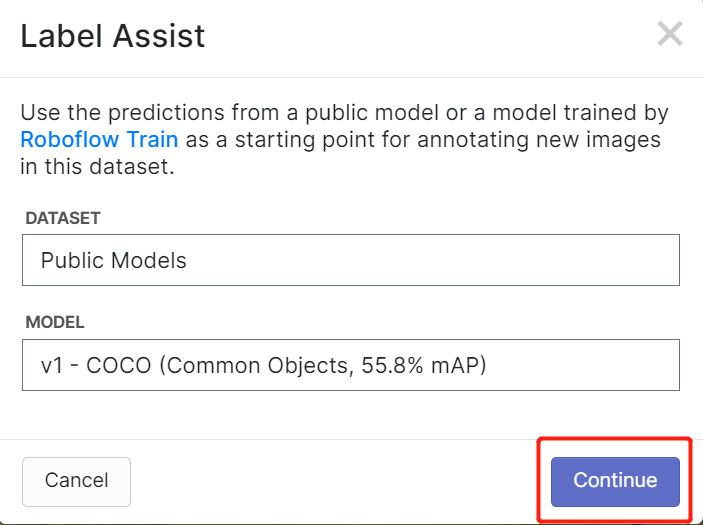
Roboflow has a feature called Label Assist where it can predict the labels beforehand so that your labelling will be much faster. However, it will not work with all object types, but rather a selected type of objects. To turn this feature on, you simply need to press the Label Assist button, select a model, select the classes and navigate through the images to see the predicted labels with bounding boxes
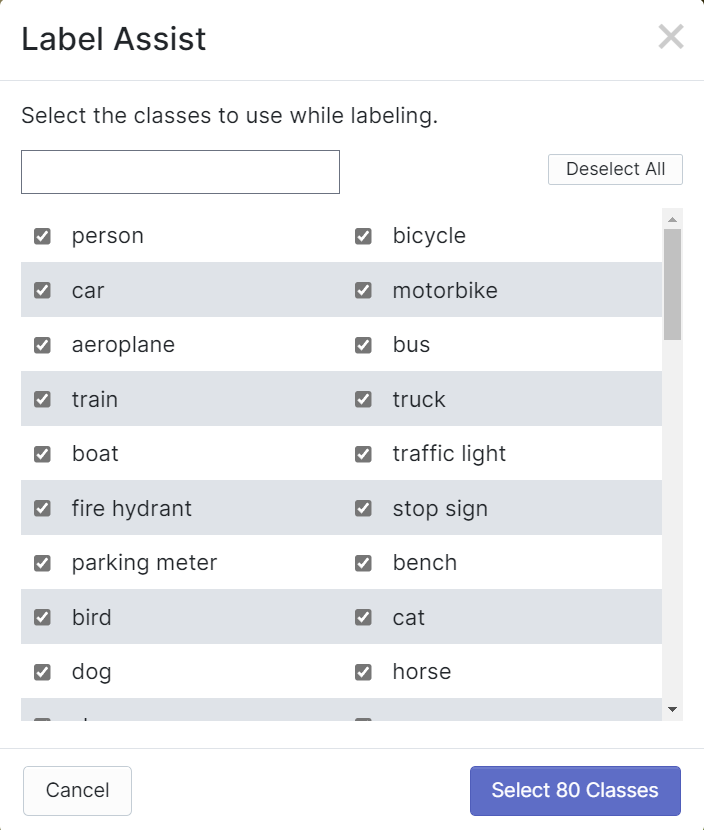
As you can see above, it can only help to predict annotations for the 80 classes mentioned. If your images do not contain the object classes from above, you cannot use the label assist feature.
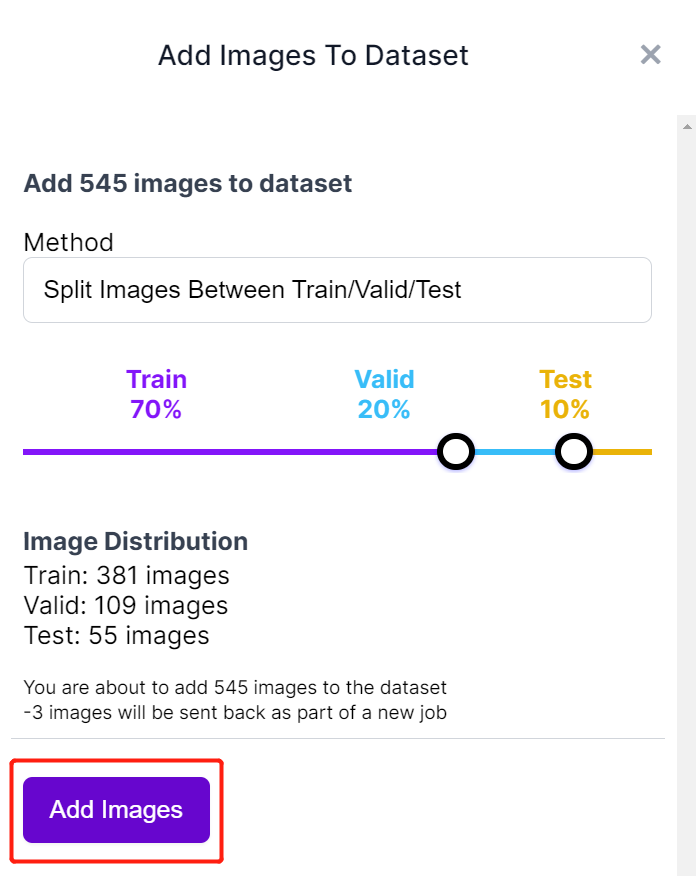
- Step 10. Once labelling is done, click Add images to Dataset

- Step 11. Next we will split the images between "Train, Valid and Test". Keep the default percentages for the distribution and click Add Images
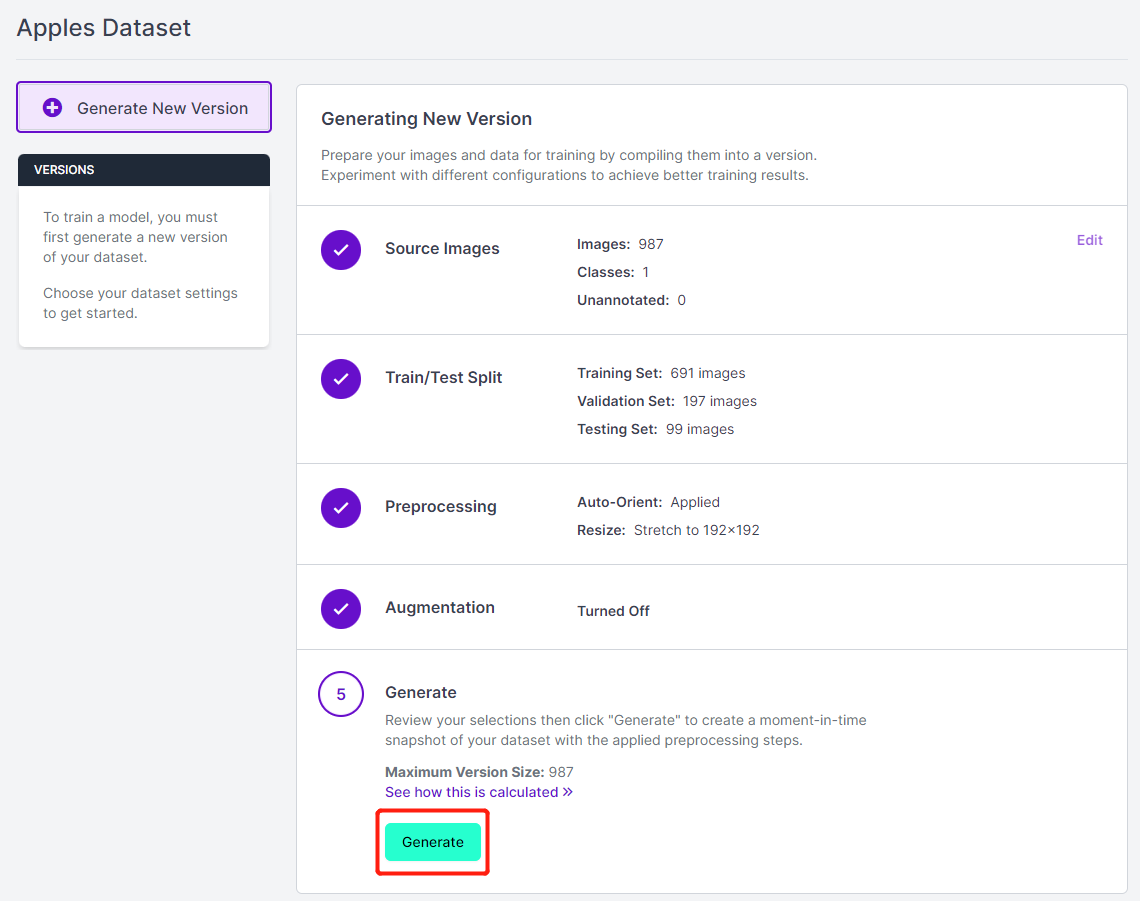
- Step 12. Click Generate New Version

-
Step 13. Now you can add Preprocessing and Augmentation if you prefer
-
Step 14. Next, proceed with the remaining defaults and click Generate
- Step 15. Click Download, select COCO as the Format, click download zip to computer and click Continue
Note: You can also choose Pascal VOC as the Format
This will place a .zip file in the Downloads folder on your PC
- Step 16. Go to Downloads folder and unzip the downloaded file
cd ~/Downloads
unzip **file_name.zip**
## for example
unzip Apple\ Detection.v1i.coco.zipHere we provide instructions on how to train AI models for object detection and analog meter reading detection.
We will choose the profile according to the task that we want to implement. We have prepared preconfigured files inside the the configs folder.
For our meter reading detection example, we will use pfld_mv2n_112.py config file. This file will be mainly used to configure the dataset for training including the dataset location.
For our object detection example, we will use yolov3_mbv2_416_voc.py config file. This file will be used to configure the dataset for training including the dataset location, number of classes and the label names.
Here we use the previously downloaded dataset for training
Execute the following command inside the activated conda virtual environment terminal to start training an end-to-end analog meter reading detection model.
python tools/train.py mmpose configs/pfld/pfld_mv2n_112.py --gpus=1 --cfg-options total_epochs=100 The format of the above command looks like below
python tools/train.py <task_type> <config_file_location> --gpus=<cpu_or_gpu> --cfg-options total_epochs=<number_of_epochs>where:
- <task_type> refers to either mmcls for classfication, mmdet for detection and mmpose for pose estimation
- <config_file_location> refers to the path where the model configuration is located
- <cpu_or_gpu> refers to specifying whether you want to train on CPU or GPU. Type 0 CPU and 1 for GPU
- --cfg-options total_epochs=<number_of_epochs> refers to the number of training cycles
Here you can use your own dataset for training
Execute the following command inside the activated conda virtual environment terminal to start training an end-to-end analog meter reading detection model.
python tools/train.py mmpose configs/pfld/pfld_mv2n_112.py --gpus=1 --cfg-options runner.max_epochs=100 data.train.index_file=/meter/train/annotations data.train.img_dir=/meter/train/images data.val.index_file=/meter/val/annotations data.val.img_dir=/meter/val/images data.test.index_file=/meter/test/annotations data.test.img_dir=/meter/test/imagesThe format of the above command looks like below
python tools/train.py <task_type> <config_file_location> --gpus=<cpu_or_gpu> --cfg-options runner.max_epochs=<number_of_epochs> data.train.index_file=<absolute_path_to_annotations_in_train> data.train.img_dir=<absolute_path_to_images_in_train> data.val.index_file=<absolute_path_to_annotations_in_val> data.val.img_dir=<absolute_path_to_images_in_val> data.test.index_file=<absolute_path_to_annotations_in_test> data.test.img_dir=<absolute_path_to_images_in_test>where:
- <task_type> refers to either mmcls for classfication, mmdet for detection and mmpose for pose estimation
- <config_file_location> refers to the path where the model configuration is located
- <cpu_or_gpu> refers to specifying whether you want to train on CPU or GPU. Type 0 CPU and 1 for GPU
- --cfg-options runner.max_epochs=<number_of_epochs> refers to the number of training cycles
- --cfg-options data.train.index_file=<absolute_path_to_annotations_in_train> refers to the location of the annotations files under train set
- --cfg-options data.train.img_dir=<absolute_path_to_images_in_train> refers to the location of the images files under train set
- --cfg-options data.val.index_file=<absolute_path_to_annotations_in_val> refers to the location of the annotations files under validation set
- --cfg-options data.val.index_file=<absolute_path_to_annotations_in_val> refers to the location of the image files under validation set
- --cfg-options data.test.index_file=<absolute_path_to_annotations_in_test> refers to the location of the annotations files under test set
- --cfg-options data.test.img_dir=<absolute_path_to_images_in_test> refers to the location of the image files under test set
After the training is completed, a model weight file will be generated under ~/edgelab/work_dirs/pfld_mv2n_112/exp1/latest.pth. Remember the path to this file, which will be used when exporting the model.
Download PASCAL VOC dataset automatically and start training
python tools/train.py mmdet configs/yolo/yolov3_mbv2_416_voc.py --gpus=0 --cfg-options runner.max_epochs=100The format of the above command looks like below
python tools/train.py <task_type> <config_file_location> --gpus=<cpu_or_gpu> --cfg-options runner.max_epochs=<number_of_epochs>where:
- <task_type> refers to either mmcls for classfication, mmdet for detection and mmpose for pose estimation
- <config_file_location> refers to the path where the model configuration is located
- <cpu_or_gpu> refers to specifying whether you want to train on CPU or GPU. Type 0 CPU and 1 for GPU
- --cfg-options runner.max_epochs=<number_of_epochs> refers to the number of training cycles
Download the dataset separately and start training
python tools/train.py mmdet configs/yolo/yolov3_mbv2_416_voc.py --gpus=0 --cfg-options runner.max_epochs=100 model.num_classes=1 data.train.dataset.classes=('apple',) data.train.dataset.ann_file='/home/<username>/Downloads/train/_annotations.coco.json' data.train.dataset.img_prefix='/home/<username>/Downloads/train' data.val.classes=('apple',) data.val.ann_file='/home/<username>/Downloads/valid/_annotations.coco.json' data.val.img_prefix='/home/<username>/Downloads/valid' data.test.classes=('apple',) data.test.ann_file='/home/<username>/Downloads/test/_annotations.coco.json' data.test.img_prefix='/home/<username>/Downloads/test'The format of the above command looks like below
python tools/train.py <task_type> <config_file_location> --gpus=<cpu_or_gpu> --cfg-options runner.max_epochs=<number_of_epochs>where:
- <task_type> refers to either mmcls for classfication, mmdet for detection and mmpose for pose estimation
- <config_file_location> refers to the path where the model configuration is located
- <cpu_or_gpu> refers to specifying whether you want to train on CPU or GPU. Type 0 CPU and 1 for GPU
- --cfg-options runner.max_epochs=<number_of_epochs> refers to the number of training cycles
Note: If your GPU gives an error saying that there is not enough GPU memory, you can pass the below paramaters to the above command
--cfg-options data.samples_per_gpu=8
## if there is still error with the above
--cfg-options data.samples_per_gpu=4After the training is completed, a model weight file will be generated under ~/edgelab/work_dirs/yolov3_mbv2_416_voc.py/exp1/latest.pt.
After the model training is completed, you can export the .pth file to the TFLite file format. This is important because TFLite format is more optimized to run on low power hardware. Assuming that the environment is in this project path, you can export the models you have trained before to the TFLite format by running the following command:
Export the previously trained model for analog meter reading detection
python tools/export.py configs/pfld/pfld_mv2n_112.py --weights work_dirs/pfld_mv2n_112/exp1/latest.pth --data ~/datasets/meter/train/imagesThis will generate a latest_int8.tflite file inside ~/Edgelab/work_dirs/pfld_mv2n_112/exp1 directory
Export the previously trained model for object detection
Coming soon!
The format of the above command looks like below
python tools/export.py configs/xxx/xxx.py --weights <location_to_pth_from_training> --data_root <location_to_images_directory_of__train_or_val>where:
- configs/xxx/xxx.py refers to the location of the configuration file correcsponsing to the AI model
- --weights refers to the the .pth file that was generated during training
- --data refers to the images directory of either train or val
Now we will convert the generated TFLite file to a UF2 file so that we can directly flash the UF2 file into Grove - Vision AI Module and SenseCAP A1101
Export TFLite model to a uf2 file for analog meter reading detection
python Edgelab/examples/vision_ai/tools/ufconv/uf2conv.py -f GROVEAI -t 1 -c ~/Edgelab/work_dirs/pfld_mv2n_112/exp1/latest_int8.tflite -o model.uf2This will generate a model.uf2 file inside ~/Edgelab/examples/vision_ai directory
Export TFLite model to a uf2 file for object detection
Coming soon!
Here you only change the location of the TFLite model such as ~/Edgelab/work_dirs/pfld_mv2n_112/exp1/best_loss_epoch_int8.tflite
This explains how you can flash the previously generated firmware (firmware.uf2) and the model file (model.uf2) to Grove - Vision AI Module and SenseCAP A1101.
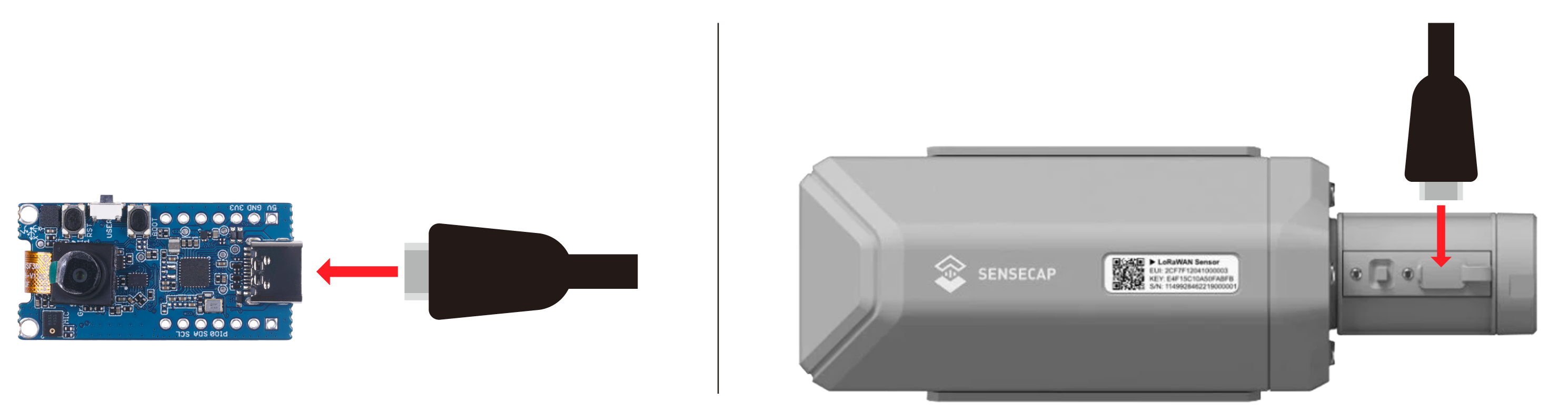
- Step 1. Connect Grove - Vision AI Module/ SenseCAP A1101 to PC by using USB Type-C cable
- Step 2. Double click the boot button to enter boot mode

- Step 3: After this you will see a new storage drive shown on your file explorer as GROVEAI for Grove - Vision AI Module and as VISIONAI for SenseCAP A1101

- Step 4: Drag and drop the previous firmware.uf2 at first, and then the model.uf2 file to GROVEAI or VISIONAI
Once the copying is finished GROVEAI or VISIONAI drive will disapper. This is how we can check whether the copying is successful or not.
-
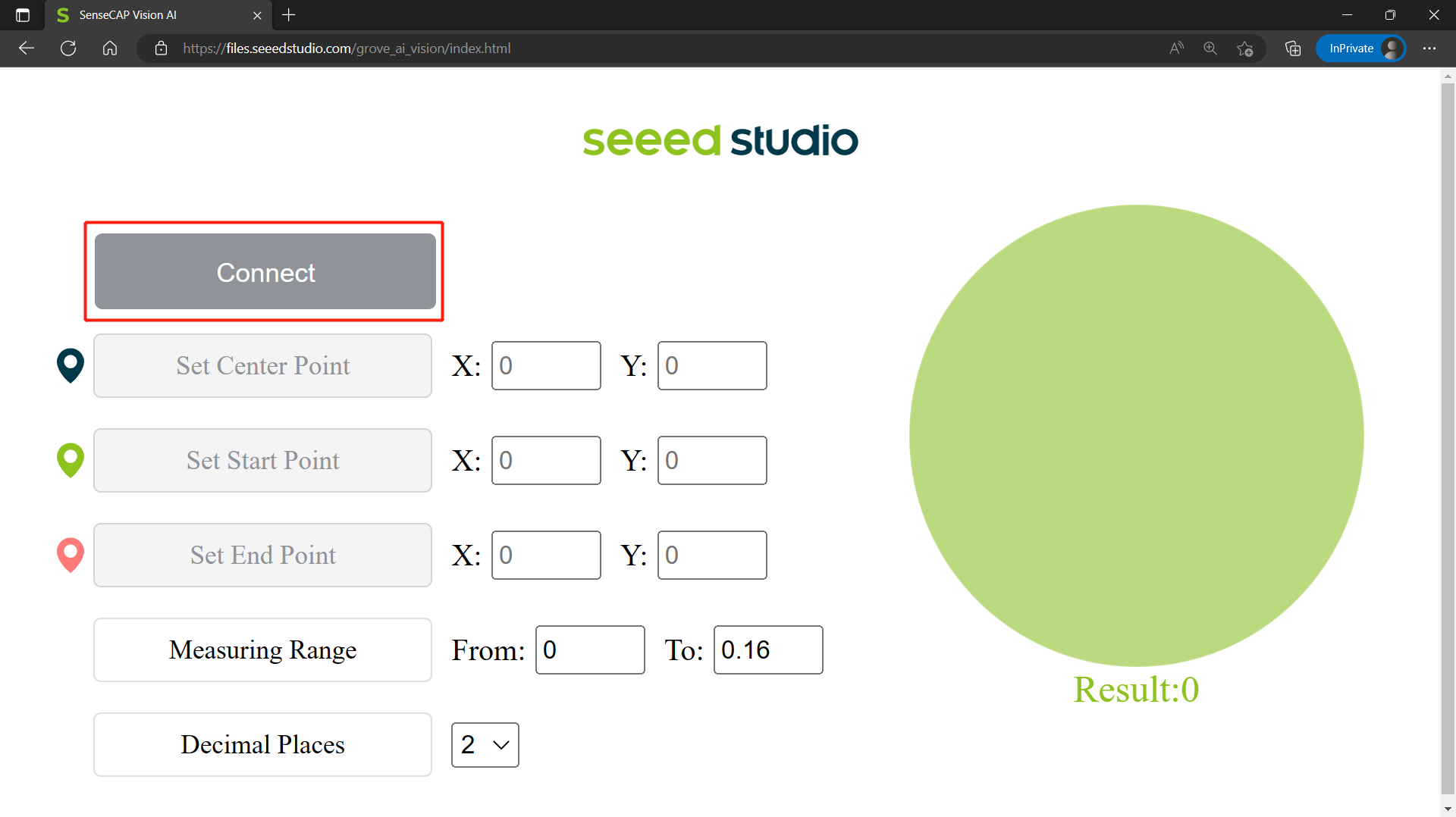
Step 1: After loading the firmware and connecting to PC, visit this URL
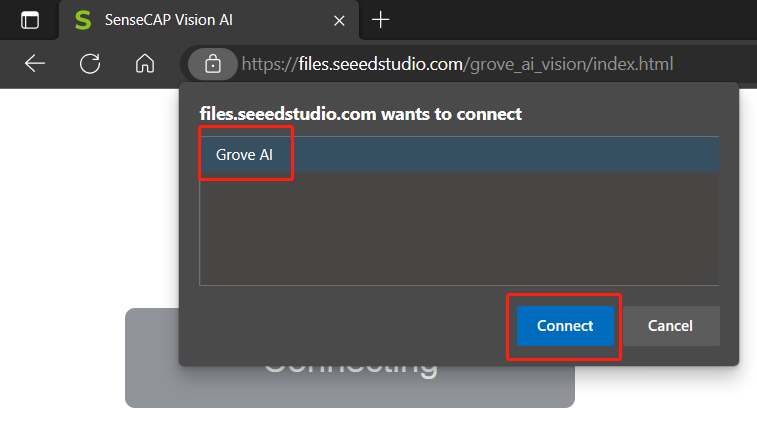
-
Step 2: Click Connect button. Then you will see a pop up on the browser. Select Grove AI - Paired and click Connect
Upon successful connection, you will see a live preview from the camera. Here the camera is pointed at an analog meter.
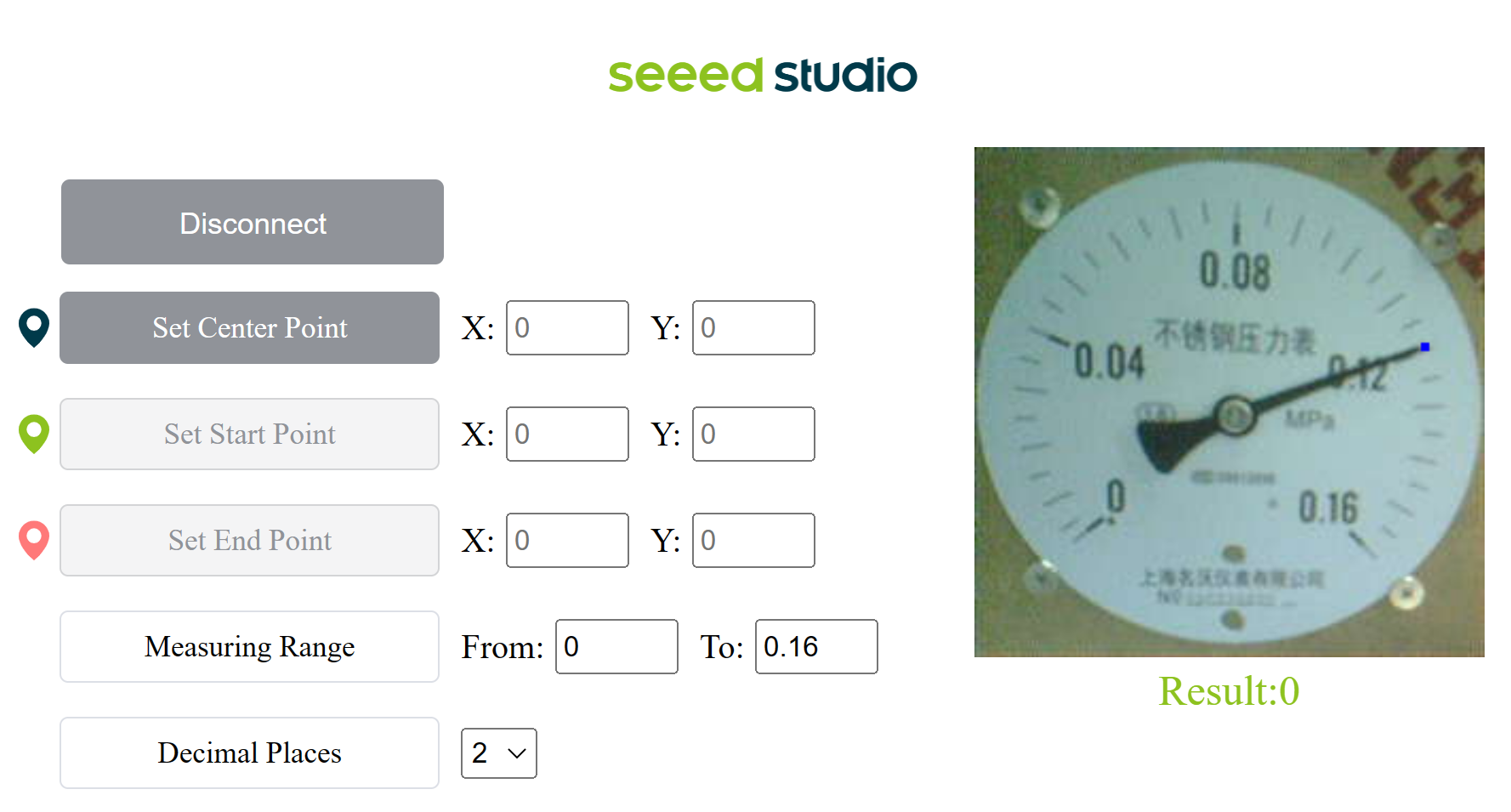
Now we need to set 3 points which is the center point, start point and the end point.
- Step 3: Click on Set Center Point and click on the center of the meter. you will see a pop up confirm the location and press OK
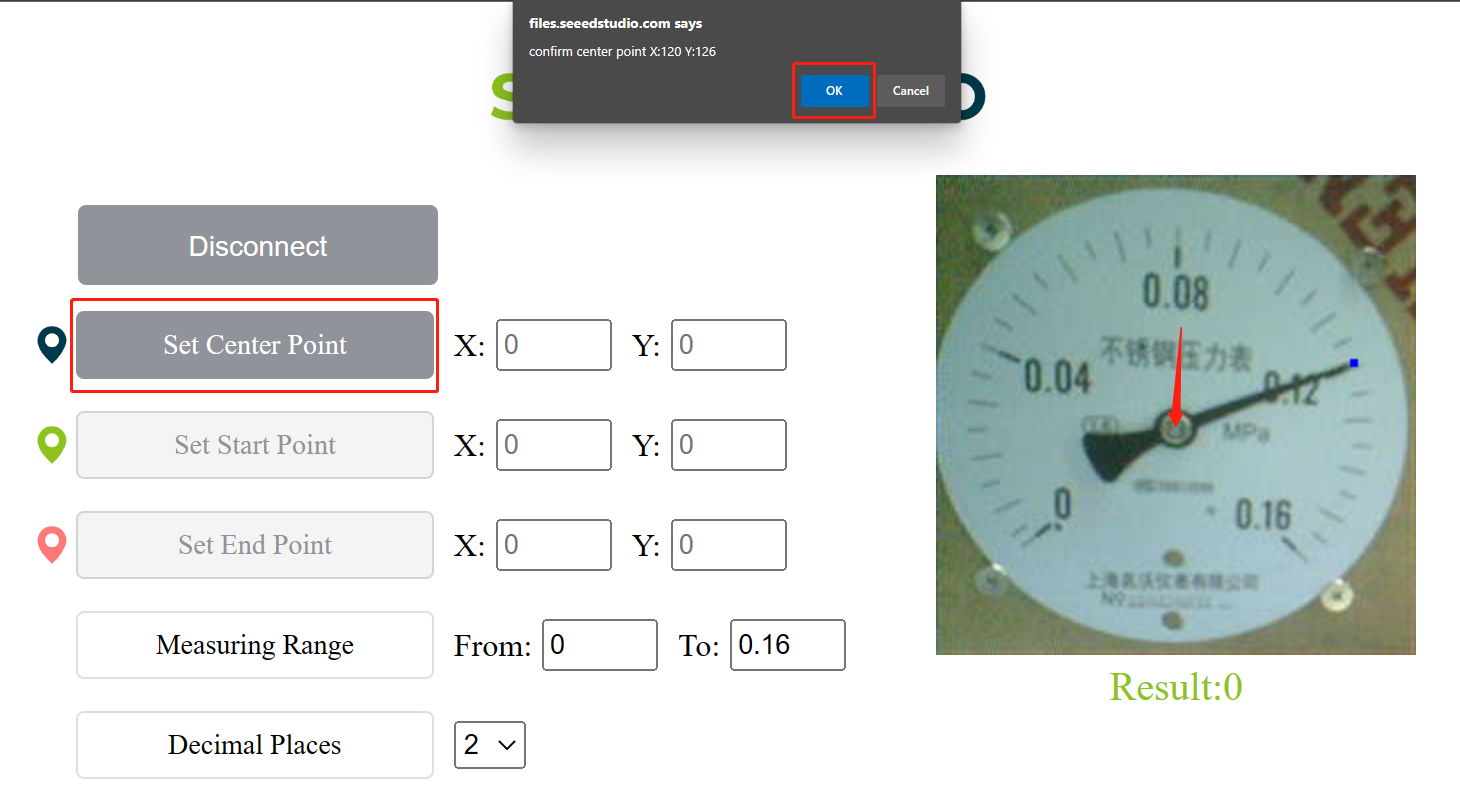
You will see the center point is already recorded

- Step 4: Click on Set Start Point and click on the first indicator point. you will see a pop up confirm the location and press OK
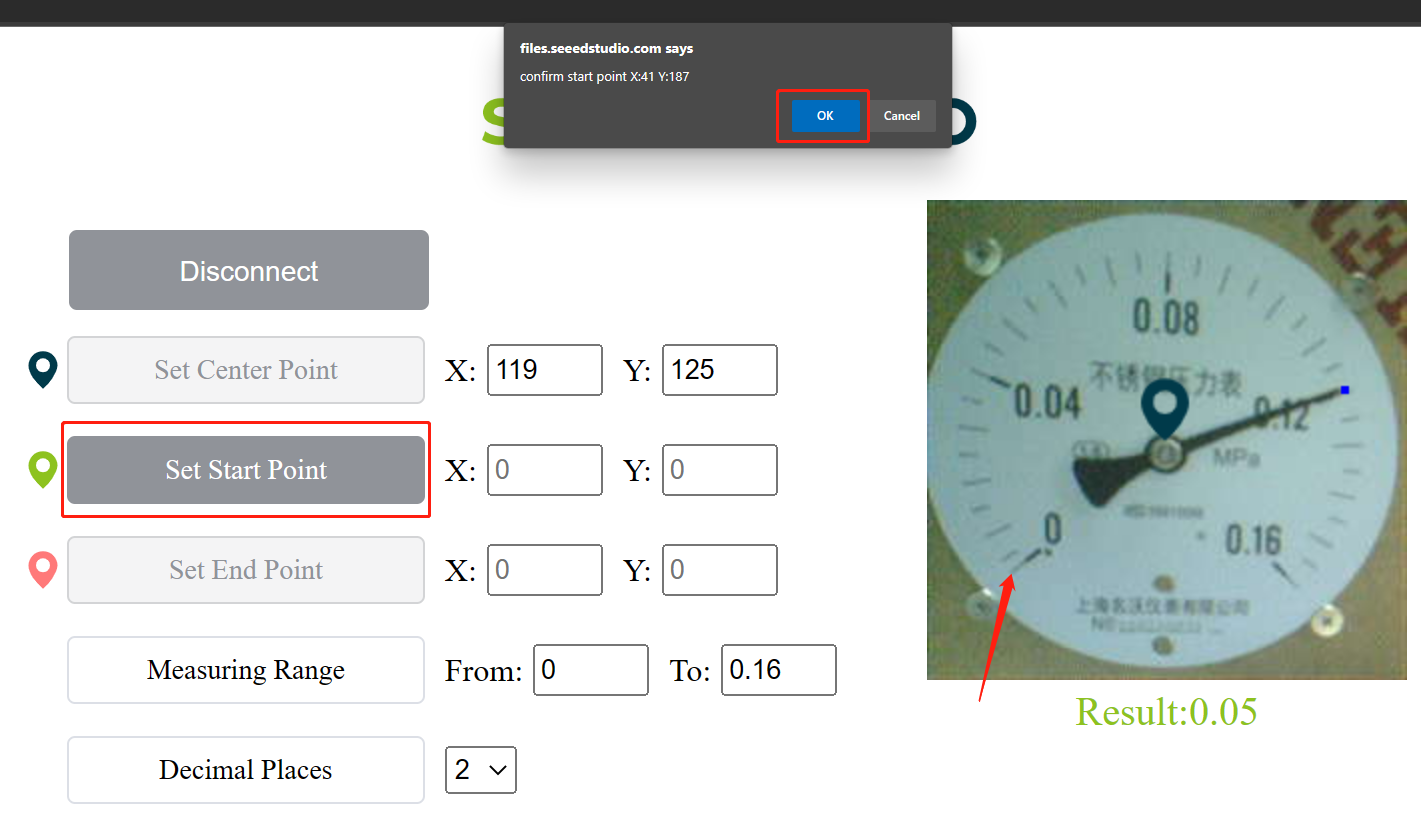
You will see the first indicator point is already recorded

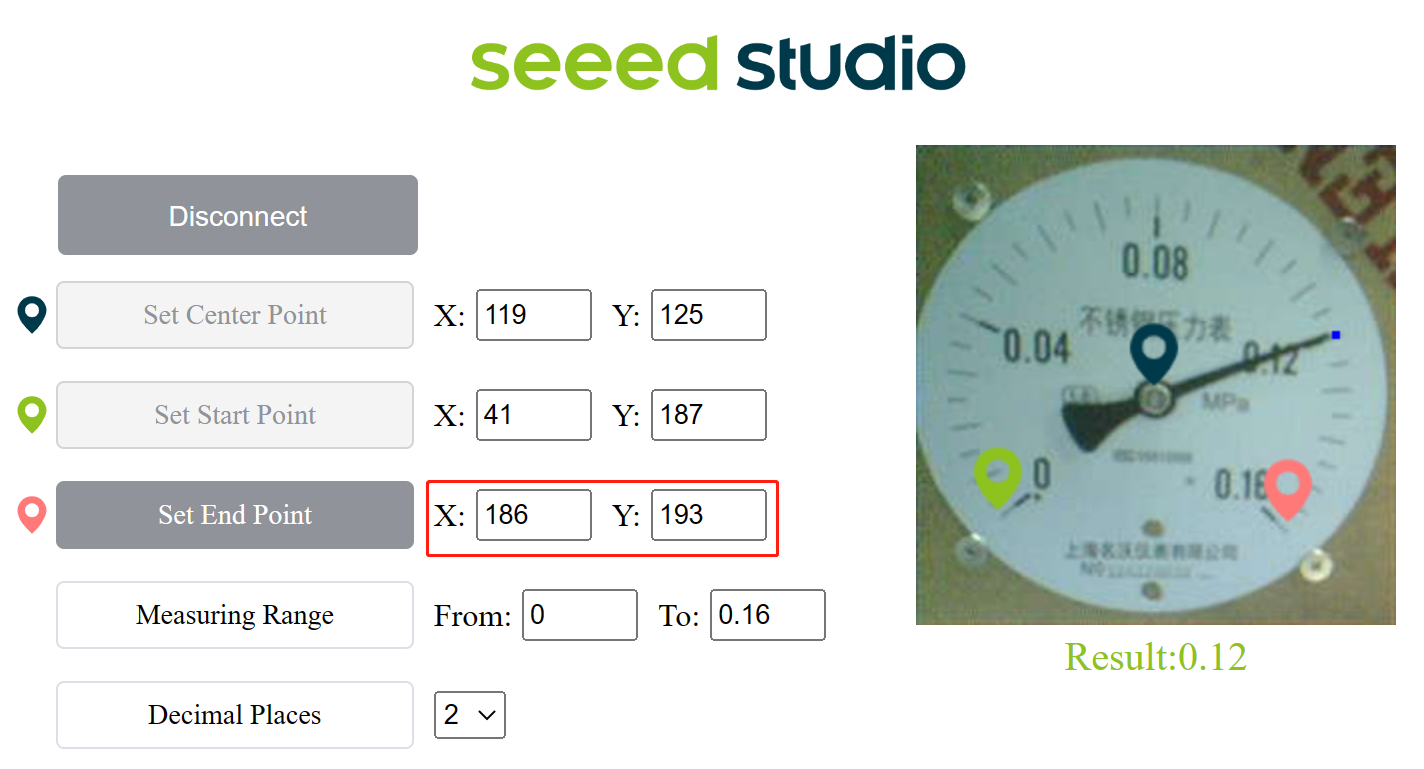
- Step 5: Click on Set End Point and click on the last indicator point. you will see a pop up confirm the location and press OK

You will see the last indicator point is already recorded
- Step 6: Set the measuring range according to the first digit and last digit of the meter. For example, he we set as From:0 To 0.16

- Step 7: Set the number of decimal places that you want the result to display. Here we set as 2

Finally you can see the live meter reading results as follows