{kind=link}
Repository for the Mechanical Design of robots by IIT Kharagpur KRSSG for FIRA Roboworld Cup.
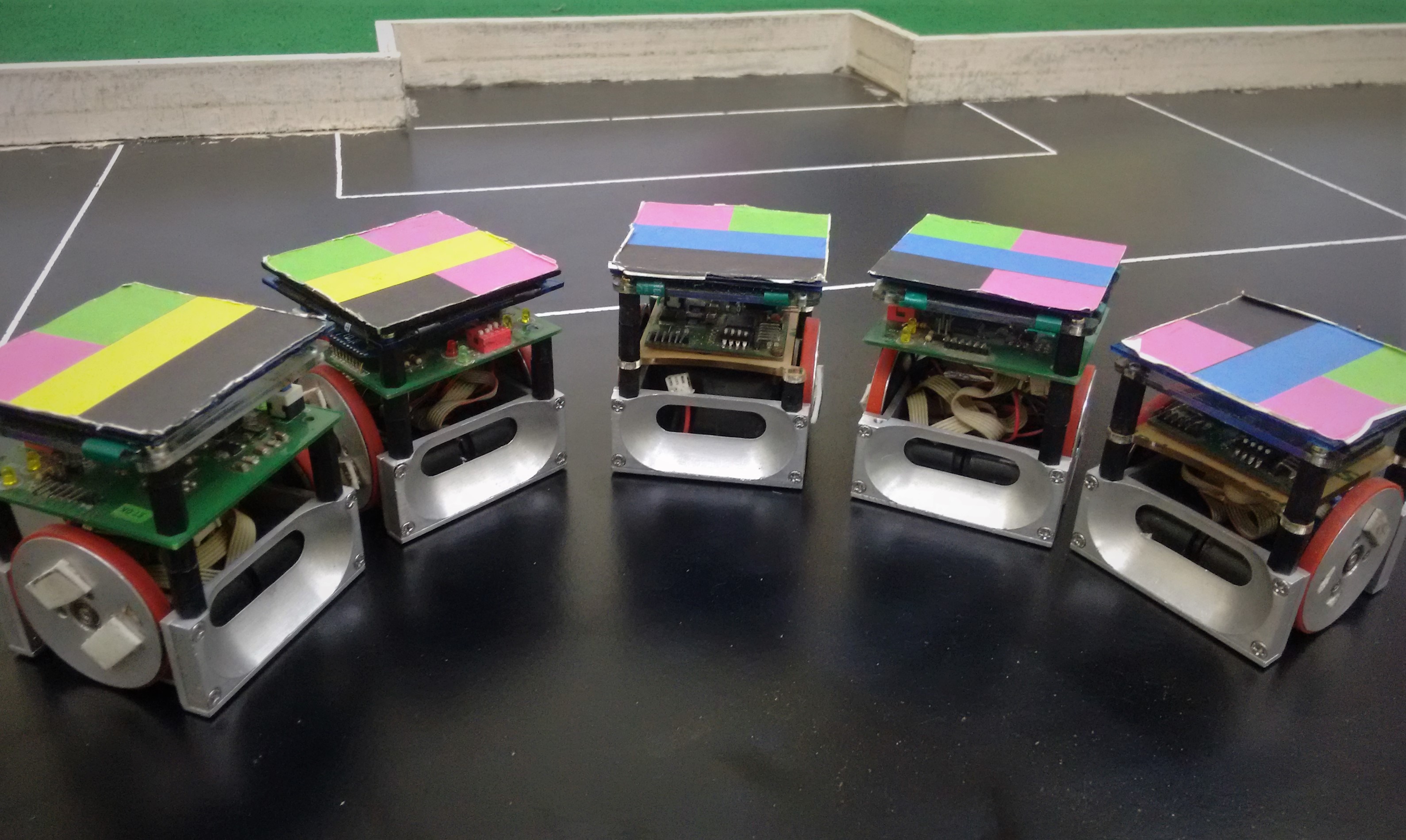
The bot has two wheels parallel to each other for forward and backward movement. There are two castor wheels on the perpendicular sides of the wheel so that chassis is not in direct contact of ground as it will increase the friction.
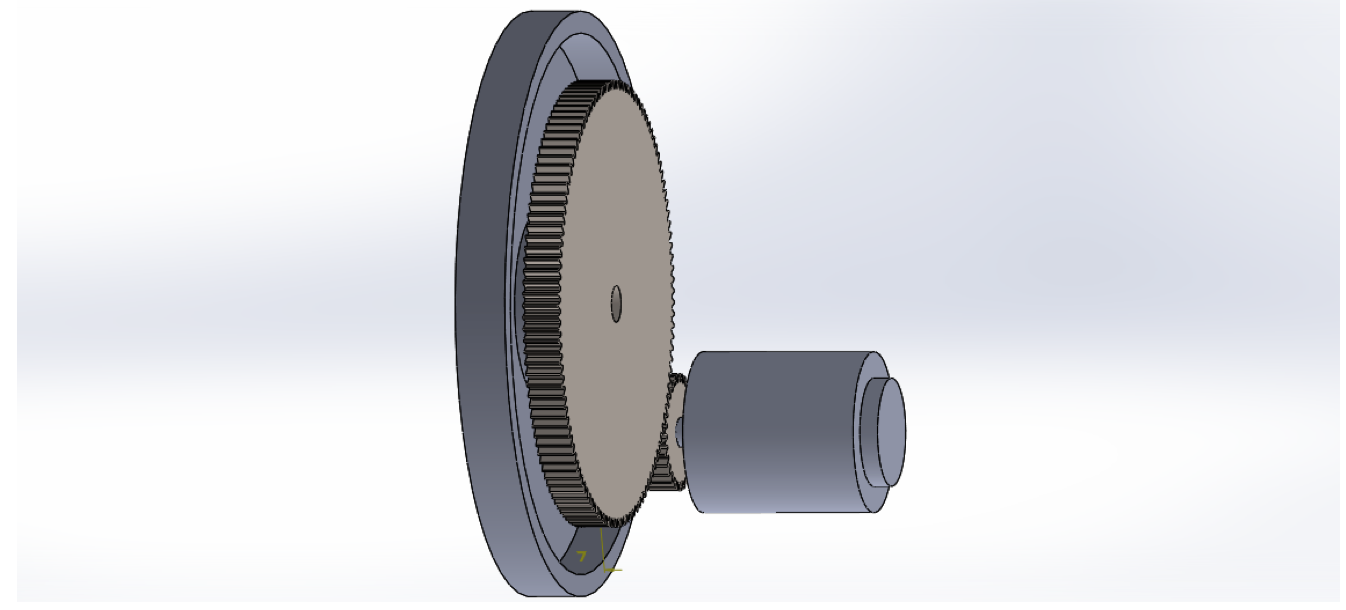
The motor used is Faulhaber which is used to drive both the wheels.
Two spur gears,one for motor and other attached to wheel are used.
Wheels are 40 mm in diameter and a rubber grip is fixed on the wheel for better friction. Wheel-Motor Connection The motor is mounted on chassis and then a gear is fit from outside. The wheel with gear is mounted on axle so that both the gear meshes with each other.
The bot is not having any particular dribbling device but we make grooves in the front and back part of chassis to hold the ball while moving.it has two groves on each side in such a way that only 20% of the ball is inside the chassis of bot.
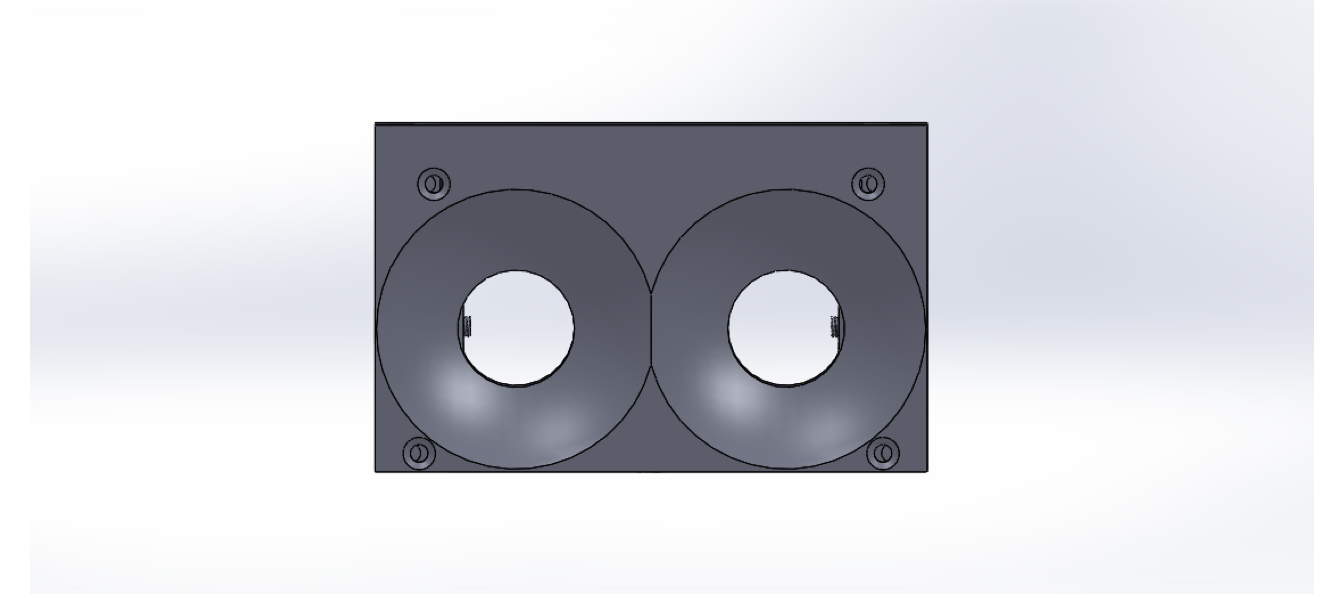
Chassis is 7.5cm x 7.5cm x 6cm made up of aluminium .It is made in four different parts , two parts of wheel and two for dribbling grooves , they are joined together , mounting motor inside and mounting axle and then battery is kept over the motors in between the four sides. The motors are aligned one after other .Then circuit is mounted at the top of the chassis with the help of studs.
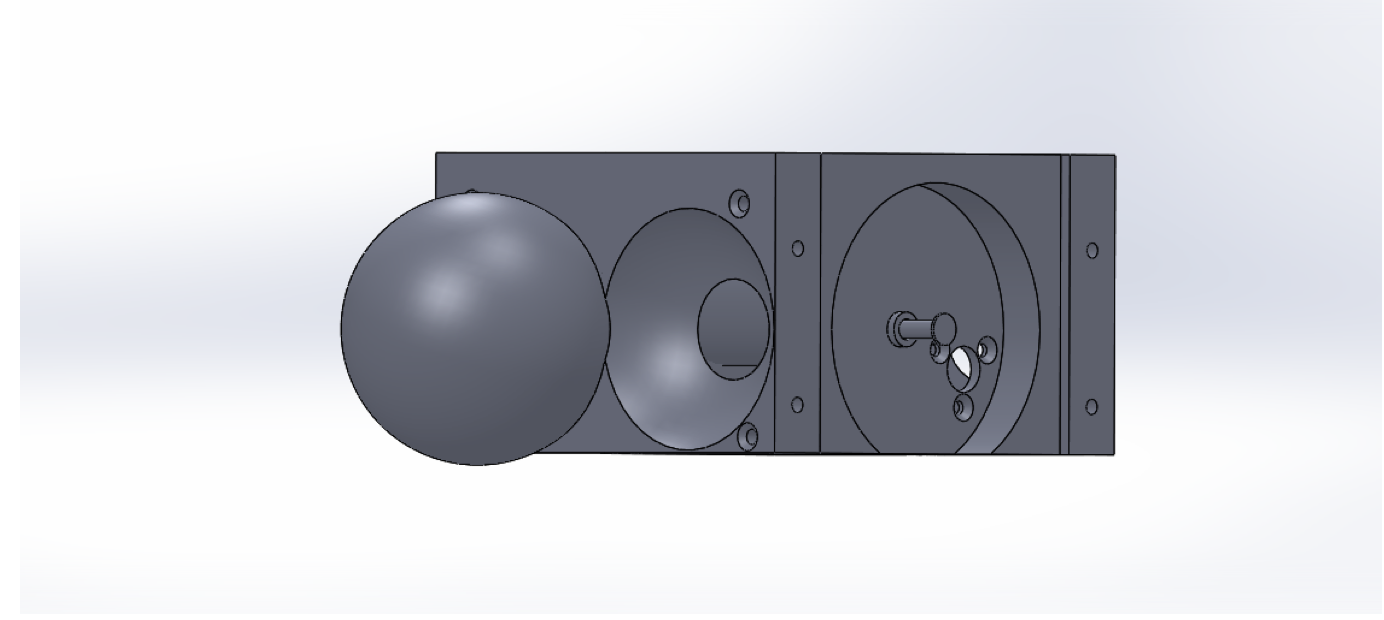
There is not much difference in overall chassis of the robot excpet for two major changes:
The front two grooves have been merged into a single groove for better control over the ball.
The assembly of the two caster balls have been improved. An additional plate at the bottom now supports the balls in their grooves.
